定义:体三维VR中所能实现的沉浸水平,其中用户的身体运动能够决定他们在体验中的位置。
这种现象最有力的例子之一是,用户站在悬崖附近会产生强烈的眩晕感。即便他们知道前方并非悬崖,但许多用户都难以移动双腿。
--------------------------------------------------------------------------------------------------------------------
延伸阅读:
建立在“认知即计算”这一命题的基础上,“脑是智能载体”的观点被广泛接受,“大脑控制身体”被认为是常识。但是,“智能的具身化”思想挑战这一传统命题,强调认知和智力活动不仅仅是大脑孤立的计算,而是大脑、身体和环境的相互作用。
本文基于Rolf Pfeifer和Josh Bongard的著作《How the Body Shapes the Way We Think》进行摘录和点评。本书在Google学术上的引用为1400次,翻译版《身体的智能》在国内也并不出名(老实说译文水平一般)。
但是,在浏览全书和检视阅读过程中,笔者发现本书主旨鲜明,对“智能的具身化”思想进行了清晰的阐述,并基于此思想构建了基于“智能的理论”框架。全书结构脉络清晰,四部分分别给出了具身化思想,理论架构,应用和原理启示,丰富了构建机器智能的一种新视角。
因此,笔者拟根据原书的四部分,构建具有逻辑关联的问题集合,采用Q&A的方式,凝练本书的主要内容,并横向比较复杂系统、机器学习、多智能体等领域的研究进展进行评述。
第一部分 智能的具身性思想提出
思考、认知和智能的定义是什么?
– 作者认为:这三个词都是非常一般化的词汇。思考与意识相关,认知用于与“感觉-行动”非直接相关的行为,而智能最一般化,具有极其的广度。
– 作者认为:尽管许多学者试图给出智能的准确定义,例如“智能是学习到的或者学习以调整自己适应环境的能力”,又如“智能是接受知识的能力以及所拥有的知识”等等。但是作者认为给出智能的准确定义是困难而且没必要,应该关注寻找感兴趣的问题来推进研究。
– 笔者点评:笔者同意智能的准确定义是困难,但是并非没有必要。例如,马文明斯基的《情感机器》就试图在通过解构智能的多元性和层次性来准确地定义和诠释智能,尽管马文明斯基的思路还是“认知主义范式”。
什么是“智能的具身性”思想?
– 简要回答:智能总是需要一个身体,智能只有归于具身化的智能体(agent)。
为什么要提出智能的具身性?
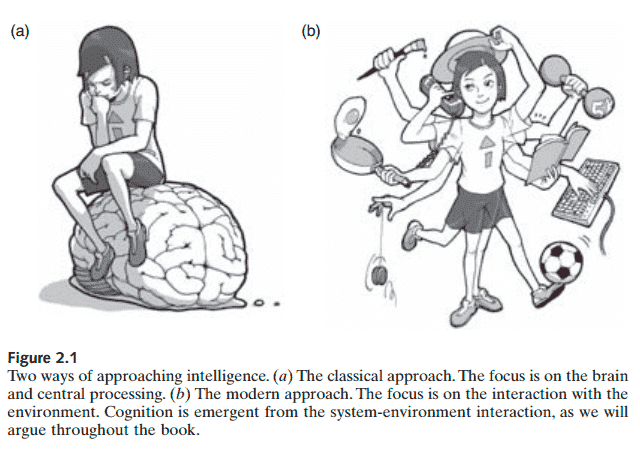
– 1980年代中期,Rodney Brooks提出AI一直以来的研究(古典主义)过于关注大脑,侧重逻辑、解决问题和推理,这些都是基于对人类智能的反思,试图了解内心过程。但是Rodney认为这是误导,本质上AI研究应该基于人类智能与真实世界交互机制,因此“智能需要一个身体”。Rodney强调“忘记复杂内部表达和世界模型,不侧重复杂的推理,而是应该强调系统-环境的交互作用”。
– 作者认为:目前具身型AI即现代方法和实质方向,即取代了古典方法,因此本书后面都不再提“具身性AI”。
– 笔者点评:Rodney将AI的研究分为两个大方向,前者为“认知型AI”,后者为“具身型AI”,一个主内一个主外,如下图所示。但这并不意味着两者是互不包容的,而应当协调发展,争取打通内部认知和外部交互的通路。
笔者思考:如果要打通内部认知和外部交互的通路,可能怎么做?
– 现在火热的统计学习可归类于认知型AI,但是在很多方面超越了符号系统,而且通过与强化学习的结合,能够通过“身体”与外部世界交互。
– 基于深度学习和(深度)强化学习构建了非常高性能的“内部表达和世界模型”(下围棋、打dota等),如果能够突破“可解释性”问题,那么就可能与符号系统相连接,增强逻辑和推理能力。
– 目前,已经有不少令人欣喜的成果在朝这个方向努力,例如Interpretable Convolutional Neural Networks和Relational Deep Reinforcement Learning等等.
具身化AI的研究为什么显得较少?
– 直接搜索embodied AI确实文献不多,但是其实80年代后,相关研究分布在多个学科和方向中,比如仿生/发育/进化机器人学,普适计算与界面技术,多智能体,人工生命等。
延伸阅读来源:https://blog.csdn.net/zb14zb14/article/details/80947997













