定义:陀螺仪,是能检测到物体在空间中的姿态 / 朝向的传感器。
特点:在 VR 显示器里的景象,如果要随着人头部的运动而实时产生变化,则必须知道人头部的朝向。比如,当带着 VR 眼镜的人向上看时,眼睛里的显示器,需要实时的显示虚拟的天空,而这个“向上看”的动作,就需要陀螺仪来检测。
--------------------------------------------------------------------------------------------------------------------
引申阅读:
装置介绍
绕一个支点高速转动的刚体称为陀螺(top)。通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。与苍蝇退化的后翅(平衡棒)原理类似。
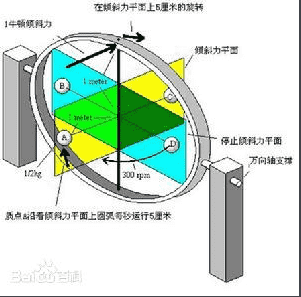
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,环绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。
人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope),它在科学、技术、军事等各个领域有着广泛的应用。比如:回转罗盘、定向指示仪、炮弹的翻转、陀螺的章动等。
陀螺仪的种类很多,按用途来分,它可以分为传感陀螺仪和指示陀螺仪。传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器。指示陀螺仪主要用于飞行状态的指示,作为驾驶和领航仪表使用。
陀螺仪分为,压电陀螺仪,微机械陀螺仪,光纤陀螺仪和激光陀螺仪,它们都是电子式的,并且它们可以和加速度计,磁阻芯片,GPS,做成惯性导航控制系统。
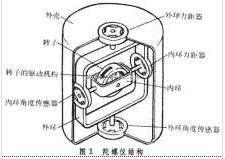
结构
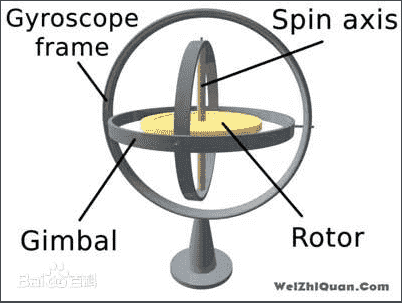
基本上陀螺仪是一种机械装置,其主要部分是一个对旋转轴以极高角速度旋转的转子,转子装在一支架内;在通过转子中心轴XX1上加一内环架,那么陀螺仪就可环绕平面两轴作自由运动;然后,在内环架外加上一外环架;这个陀螺仪有两个平衡环,可以环绕平面三轴作自由运动,就是一个完整的太空陀螺仪(space gyro)。
历史
1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子 (rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,他用希腊字 gyro(旋转)和skopein(看)两字合为gyro scopei 一字来命名这种仪表。
陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,但直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的稳定性和进动性。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的稳定性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。
均衡陀
当转子对自转轴的转动惯量为I,自转角速度为ω时,则转子的自转动量矩为L=Iω。假定支架轴承都绝对光滑,基座不能通过这些轴承把外力矩传给转子,且内、外两框环的质量可忽略不计。于是,由动量矩守恒可知,均衡陀螺仪的转子轴将能借惯性而在惯性空间保持不变方向。假如用某种方式给转子以冲击性外力矩,使动量矩L获得横向增量

且
则新动量矩矢将偏转一个小角
冲击还使转子轴的方向产生同一数量级的改变,但新的角速度方向已和新的动量矩方向不一致。冲击后,转子轴将紧靠新动量矩L+△L的方向作微幅高频的抖动(章动),其幅度与ω成反比,而频率则与ω成正比。由于ω很大,这种抖动实际上是不易察觉的,所以可认为冲击并未明显改变转子轴的方向,即高速自转均衡陀螺仪的转子轴具有抗冲击的能力,这种特性称为定轴性。但是,如果转子没有自转,那么任何微小冲击将使转子轴获得角速度,而此后将按这个方向无限制地偏离下去。
如果沿内环轴持久地施加外力矩M,由于存在自转动量矩L,转子不会沿M方向绕内环轴转动,而绕十字交叉轴(即外环轴)以某一角速度Ω持久地转动(旋进)。由动量矩定理可以证明,旋进角速度Ω的大小反比于自转角速度ω的大小,即

式中θ为ω和Ω的交角。其次,由作用与反作用定律可知,转子对外力矩M的施加者有反作用力矩K=-M。这个力矩称为陀螺反抗力矩或陀螺力矩,其大小为:
K=ΩL sinθ=IωΩ sinθ=M,
方向与M相反。K是科里奥利(惯性)力的矩。陀螺仪转子还有其他惯性力矩。当旋进非匀速时,角加速度和转子对旋进轴的转动惯量的乘积冠以负号,称为单轴转动惯性力矩,它和陀螺力矩的大小属同一数量级。
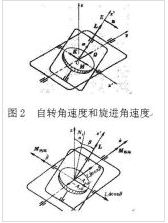
图3 在外力矩作用下内外环的运动
陀螺运动的近似微分方程组 用A1表示转子连同内、外环一起对外环轴的转动惯量,A2表示转子连同内环对内环轴的转动惯量。α、β分别是外环和内环的转角,且β由两环相垂直的位置(标记为N1)算起(图3),当外力矩引起的内、外环旋进角速度

都是小量,其平方项和乘积项都可忽略时,则各轴的外力矩(包括轴承中摩擦引起的力矩)和起决定性作用的惯性力矩可归纳如下表:
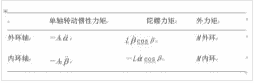
其他惯性力矩都是

的二阶或更高阶小项,因而都可以不计。
由达朗伯原理可以立即写出陀螺仪转子轴绕外环和内环旋进的近似微分方程组:

绕转子轴的自转角速度(ω+sinβ)由外力矩维持不变。
式(2)可以看成转子-内环纽合体相对于外环的转动方程。如果外环不转,即

则

就是按牛顿定律形式直接写出的转动方程。现在由于环转动而增加了修正项
此陀螺力矩对转子的相对运动有表观作用。可以看出,在此相对运动中,陀螺力矩有使自转轴按最短途径向旋进轴转动的趋势。
式(1)中也出现了陀螺力矩
这个力矩是转子给予内环的惯性反抗,因此,对于转子-内环-外环的组合来说,就和外力矩一样(惯性力不服从作用反作用定律,转子本身不因这个陀螺力矩而又受到反作用)(见动静法)。
方程(1)和(2)也可以应用于二自由度陀螺仪,如二自由度陀螺仪是由外环固定后构成的,则在方程组中应
从而式(2)就和转子无自转时的单轴转动微分方程一样-式(1)可用来确定外力矩M外环,它等于陀螺力矩
上述近似理论足以解释高速自转陀螺仪的全部动力学特性。地球作为一个陀螺,它的姿态摄动也可以由此得到说明(见刚体定点转动解法)。
原理
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫做陀螺仪。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
在现实生活中,陀螺仪发生的进给运动是在重力力矩的作用下发生的。
特性
陀螺仪被广泛用于航空、航天和航海领域。这是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是进动性(precession),这两种特性都是建立在角动量守恒的原则下。
定轴性
当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。其稳定性随以下的物理量而改变:
1.转子的转动惯量愈大,稳定性愈好;
2.转子角速度愈大,稳定性愈好。
所谓的“转动惯量”,是描述刚体在转动中的惯性大小的物理量。当以相同的力矩分别作用于两个绕定轴转动的不同刚体时,它们所获得的角速度一般是不一样的,转动惯量大的刚体所获得的角速度小,也就是保持原有转动状态的惯性大;反之,转动惯量小的刚体所获得的角速度大,也就是保持原有转动状态的惯性小。
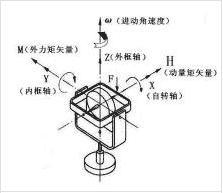
进动性
当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直。这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。如图。
这可用右手定则判定。即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝外力矩的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为进动角速度ω=M/H。
进动性的大小也有三个影响的因素:
1.外界作用力愈大,其进动角速度也愈大;
2.转子的转动惯量愈大,进动角速度愈小;
3.转子的角速度愈大,进动角速度愈小。
引申阅读来源:百度百科














